HOME | ROBOT HOME
Phase 1

|
Here's a photo from phase 1. After removing the body, I cut off the front
section of the case top to make it easier to work with the circuit board.
I cut around the center motor's mount to keep it intact. For the sake of
discussion, I call the tread on the left of this photo the RED tread and
the tread on the right BLUE.
The small circuit board contains a little logic and opto-isolators to isolate the processor (not seen). |
![]()
|
Some discussion of the Bedlam is in order. Pressing 'forward' on the remote
control drives both treads forward. Pressing 'backwards' however makes the
vehicle spin around - the RED tread reverses direction while the BLUE tread
continues forward. The BLUE tread is not bi-directional.
Beneath the Bedlam is a set of 4 wheels that pop down when the user presses 'left' or 'right' on the remote. This is a bi-directional channel, but note that when this channel is activated, the treads are disabled (the left/right wheels pick them up off the ground anyways). For my project I've disconnected the center motor from the circuit board, and I moved the BLUE tread wires to the center motor's circuitry. This makes the tread bi-directional, but the circuitry disables the RED tread when BLUE is on. To disable the interlock that shuts off Motor 1 & 3 when Motor 2 is on, remove diodes D3 & D4. In the 'parts side' photo, these are just above the 'R' in Realtek. The cathode ends of these are tied together and the trace is held to ground through a 56K resistor (except when pin 6 or 7 of the chip are on). This signal then goes through 3 10K resistors to 3 transistors, one in each Half H-bridge that gets disabled. |
![]()

|
A photo of the parts side, with the control sections outlined. |
|
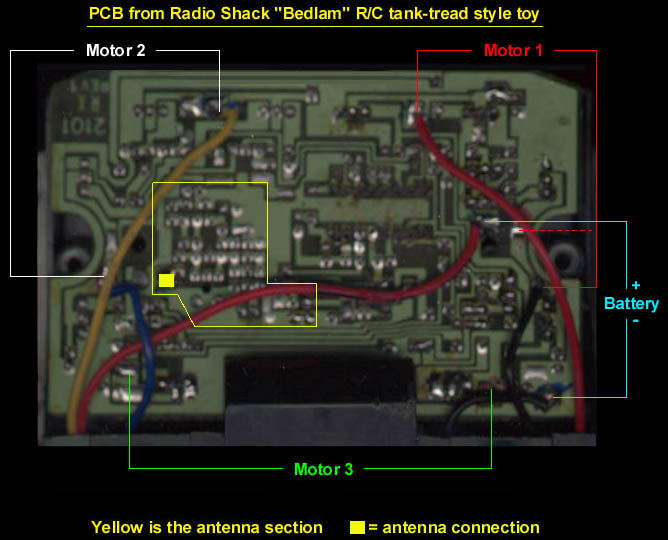
A photo of the solder side, with pointers to the motor connections. Here you can see I've moved one of the tread motors (the yellow and blue wires) from the Motor 3 connections to the Motor 2 connections for bi-directional control. |

|
This is a scan of the copper side, lightly printed, and some parts drawn on top of that. It really helps to understand the circuit. Click on the thumbnail to see the annotated drawing. Other versions: color, black & white, and light gray (for printing). |
{kind=link}
{kind=link}
{kind=link}
|
Radio Shack sells the repair manual for the Bedlam but you can only order it via phone for about $8. Call (800) 241-8742 and ask for RSU 12059390, "Manual for 60-4212".) I don't see the Bedlam listed in their new catalog, I'm guessing it is being replaced by the new "Sentinel Tank" toy they show. This looks pretty cool, the turret could be useful and I think both tracks are bidirectional. The tracks are an assembly of many hard-plastic links, the rubber tread of the Bedlam may be more suited to a robot. |
![]()
| Now some detail about the control circuitry. I have removed the Realtek receiver/control chip and soldered a socket in it's place (the socket was used in early testing). My logic provides signals to pins 6 & 7 (Motor 2) as well as 10 & 11 (Motor 1). Pin 13 seems to be the power connection for the chip, at about 3.2V. Jumping this to pins 6,7,10 or 11 should make each motor section run. Don't jumper both 6 & 7 (or 10 & 11) at the same time. I use opto-isolators to pass the 3.2V signal to each pin under processor control. |
|
|